MATURAPROJEKT - EIBLER, EDTINGER - DSP
Index
1. Projektdaten
1.1. Teilnehmer
- Projektleiter: Dr. Dipl. Ing. Bernhard Wess
- Schüler: Leo Eibler, Nico Edtinger
1.2. Zeitraum
- Klasse: 5HNB
- Jahr: 2000 - 2001
1.3. Kurzbeschreibung
Mittels des Motorola DSP 56000 soll aus einem Musiksignal die Sängerstimme ausgefiltert
werden und mit einer Modulation in einen anderen Freuqenzbereich transportiert werden. Danach
soll dies wieder dem Originalsignal beigemischt werden. Die Schaltung soll mittels PIC
angesteuert werden und die Anzeige auf ein LC-Display gebracht werden.
1.4. short description
The vocals of a music-signal should be filtered out and pitched with the Motorola DSP 56000.
This is mixed to the original signal. The whole DSP should be controlled via a PIC and the
output displayed on a LCD.
1.5. Projektverlauf
Nachdem wir auf den PCs die nötige Software installiert hatten, arbeiteten wir uns in die DSP-Dokumentation ein. Dazu verwendeten wir ein fertiges Programm von Motorola mit einem Echo-Effekt. Auch kleine Änderungen die wir im Programm vornahmen funktionierten.
Als erstes eigenes Programm wurde uns aufgetragen aus einem kleinen Programm-Code Stück und dem Beispielprogramm einen FIR-Filter zu programmieren. Der funktionierte eigentlich auch recht bald, aber es war immer ein metallisches Geräusch im Ausgangssignal. Nach langer Fehlersuche mußten wir entdecken, dass der Fehler nicht an uns lag, sondern an einem groben Fehler im original Motorola Code-Stück. Nachdem wir den Fehler ausgebessert hatten funktionierte das Programm endlich so wie es sollte.
Deshalb verbanden wir die beiden Programme auch gleich zu einem FIR-Filter mit Echo.
Dies war dann auch eine gute Ausgangslage um unsere ersten Versuche mit der PIC-Steuerung zu machen. Wir nahmen als Grundlage eine Schaltung von einem alten Maturaprojekt und passten es an unsere Erfordernisse an. Die Kombination von FIR-Filter mit Echo und PIC und LCD Steuerung präsentierten wir am Tag der offenen Tür.
Danach machten wir uns an den Modulationsfilter. Zuerst sahen wir uns ihn in der Theory mit Matlab an und berechneten auch die Koeffizienten für den Hilbert-Transformator. In der Praxis benötigten wir Sinus und Cosinus-Werte weshalb wir zuerst einmal die fertige Tabelle die Motorola in den DSP integriert hat zum Versuch am Lautsprecher ausgaben. Damit konnten wir dann die nötigen Berechnungen durchführen. Wir realisierten den Hilbert-Transformator am DSP hatten aber am Anfang noch einige Probleme, da wir einen Fehler in unserem Code hatten.
Nachdem wir den Modulationsfilter fertig hatten verknüpften wir ihn mit einem Bandpass um nur die Frequenzen, die für ein Sängersignal interessant sind, zu modulieren. Wir mussten nur noch die PIC-Steuerung und den Interrupt-Handler am DSP an den Hilbert-Transformator anpassen um das Projekt fertigzustellen.
Hier und da könnten noch einige Verbesserungen vorgenommen werden die sich aber leider zeitmässig nicht mehr ausgehen. Deshalb schliessen wir das Projekt in diesem Zustand ab.
1.6. course of the project
After we installed the needed Software on the Projet-PCs, we began to read the DSP-Documentation. We used a ready-to-go Demo-Program from Motorola with an echo-effect. We made some changes on this code and it still worked.
For our first own Program we were told to make a complete FIR-Filter based on a small code fragment from Motorola. We finished this task fast, but the signal was muffled. After a long Bughunt we discovered, that it was not our fault. The bug was in the original Motorola-Code. After we corrected the bug the filter worked as excpected.
Based on these two codes we made a filter with echo-effect to train our skills.
With this filter we began our first steps with the PIC. We made a board based in the design from an class before us. We presented our combination of DSP, PIC and LCD on the "tag der offenen tür".
After that we began with the modulationfilter. At the beginnig we tested some modulationfilter in theory with Matlab and calculated a hilbert transformator. For the DSP we needed its internal sinus-table and so we made a program to get to know how this works. With that know-how we realized the program for the modulationfilter, but we had some problems because we made a bug in our code.
Then we took the the Bandpass and filtered the singer before the modulationfilter. We just had to adjust the PIC-control a little bit to use it with the new filter.
The project is now finished. If we had more time we could change some things to do it better.
2. Verwendete Hard- und Software
2.1. Matlab
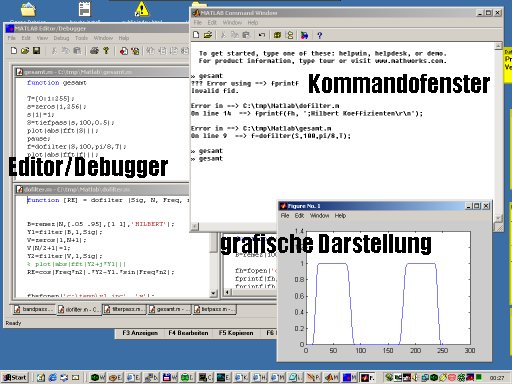 Matlab ist eine Mischung aus Kommandozeilen-Tool (ähnlich einer Shell) und
eine Programmiersprache, wie zum Beispiel C. Dabei ist es auf die Anforderungen
für mathematische Funktionen zugeschnitten und hat auch einfach verwendbare
Grafikfunktionen.
Matlab ist eine Mischung aus Kommandozeilen-Tool (ähnlich einer Shell) und
eine Programmiersprache, wie zum Beispiel C. Dabei ist es auf die Anforderungen
für mathematische Funktionen zugeschnitten und hat auch einfach verwendbare
Grafikfunktionen.
Wir verwenden Matlab um die Koeffizienten unserer Filter zu
berechnen und eine grafische Übersicht über die Funktion
der Filter zu bekommen.
2.1.1. kleine Übersicht über die verwendeten Funktionen
- ellip - elliptischer filter
[B,A]=ellip(N,Rp,Rs,Wn,...)
N - die Ordnung
Rp - Welligkeit im Db [dB]
Rs - Dämpfung im Sb [dB]
Wn - Grenzfrequenz (bei Digi. [0;1] - 1 = Samplingfrequenz/2)
analog: irgendwie in Hertz bsp: ellip(N,Rp,Rs,Wn,'s')
- freqs - fourier für analog
[H,w]=freqs(B,A,N)
B,A - Polynome vom Filter
N - Anzahl gerechneter Punkte
- freqz - fourier für digital
siehe freqs
- plot - grafische Darstellung
plot(x,y)
x,y - Punkte für die Achsen
bsp: plot(w/pi,20*log10(abs(H)))
- x[y,:]
zeile y - alle spalten
- remez - Remez Filter
[B]=remez(N,Wn,A[,filterart]);
N - die Ordnung
Wn - Grenzfrequenz (bei Digi. [0;1] - 1 = Samplingfrequenz/2)
A - Amplitude [0;1]
filterart - optional: zB 'HILBERT' für einen Hilbertfilter
- fopen - file öffnen
fh=fopen('lw:\some\path\filename', 'w');
fh - Filehandle
w - Zugriffsart schreiben
- fclose - file schliessen
fclose(fh);
fh - Filehandle
- fprintf - in file schreiben
fprintf(fh, formatstring, args);
fh - Filehandle
formatstring - zB: 'dc %1.8f\r\n'
args - Argumente für %1.8f
2.2. ICProg
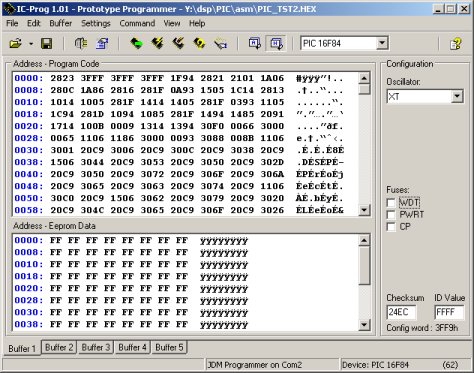
Dies ist ein Tool, um den PIC mit dem JDM Programmer
zu programmieren. Man lädt einfach nur das HEX File welches man vorher
mit zB dem MPASMWin vom MPLab erstellt hat.
Danach ist darauf zu achten, dass die richtige COM Schnittstelle, und
der richtige Programmer eingestellt ist (in unserem Fall der JDM Programmer).
Nun ist noch, ausser dem richtigen Prozessor, auszuwählen, ob man Watchdog
benutzen will (wir nicht) und welcher Taktgenerator verwendet wird (in unserem
Fall wäre das XT für einen Quarzschwingkreis).
2.3. Motorola DSP 56002
Der DSP56002 von Motorola ist heutzutage noch ein viel eingesetzter
Digitaler Signal Prozessor. Die verschiedenen Einsatzzwecke erstrecken sich
von Audio Anwendungen (in unserem Fall Echo, Hall, Stimmenverzerrung oder
Equalizer), Codec Routinen, Einsatz in der Telefonie (DTMF Routinen,
diverse Filterfunktionen, ISDN, ...), Funkübertragungen, Grafik und Bildverarbeitung
(Bilderkennung) usw. bis zur Datenverschlüsselung und Einsatz in der Medizin
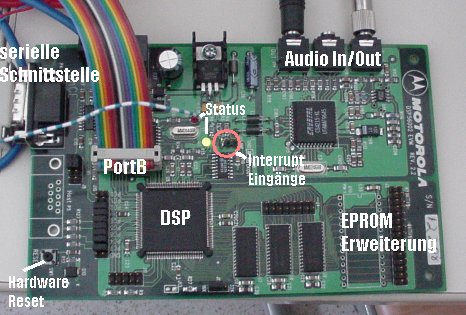
2.3.1. EVM56k Board
Wir benutzen das EVM56k Entwicklungsboard, welches als Herzstück den Motorola DSP56002
verwendet. Das Board besitzt mehrere Ein- und Ausgangsports (3 Stück), welche
teilweise zur Erweiterung dienen (um das Programm in einem externen Speicher
unterzubringen - EPROM) oder um mit externer Peripherie zu kommunizieren (PortB).
Weiters gibt es eine serielle Schnittstelle, über die der DSP im Entwicklungsstadium
programmiert und debugged wird.
Es sind auch 1 Audio Eingang (wahlweise Mikrofon oder Line - softwarekonfigurierbar)
vorhanden sowie 2 Audioausgänge (Line Out und Kopfhörer).
Das Board besitzt ebenfalls einen Festspannungsregler, um die Betriebsspannung
konstant zu halten und taktet den DSP mit 40 MHz.
2.3.2. Daten des DSP56002
- 40 MHz Takt - 20 MIPs (million instructions per second)
- 24 Bit Auflösung (intern mit bis zu 56 Bit gerechnet)
- bis zu 48 kHz Samplingfrequenz
- Paralleler Befehlssatz
- Low Power Modis
- 24 I/O Pins
- serielle Schnittstelle
- 512 x 24 Programm RAM Speicher
- 2 * 256 x 24 Daten RAM Speicher
- 2 * 256 x 24 Daten ROM Speicher (Sinus und Cosinus Tabelle)
- Möglichkeiten zur Speichererweiterung
- verschiedene Timer/Event Counter
- On Chip Emulator integriert (zum direkten Debugging im Betrieb)
2.3.3. Entwicklung
Zur Entwicklung dienten Vorerst 486er DX4 Rechner @100 MHz und dem Betriebssystem Win95.
Die Software zum Programmieren des DSP und zum Debuggen gibt es sowohl für DOS als
auch für Windows. Jetzt befindet sich die Windows Version im Einsatz. Die Übertragungsrate
zum DSP beträgt 19200 Baud. Der Assembler ist ein reines DOS Kommandozeilen Programm.
2.4. JDM Programmer
Der JDM Programmer wurde von uns selbst aufgebaut. Er wird von dem Programm ICProg
angesprochen und benötigt beim Programmieren keine zusätzliche Spannungsversorgung.
Dadurch kann es zu Problemen kommen, beim Einsatz mit Notebooks (Vermutung auf Grund
der niedrigeren Spannungspegeln der seriellen Schnittstelle).
Mit dem JDM Programmer kann der PIC 16F84 programmiert werden. Selbst der Takt wird
vom PC generiert.
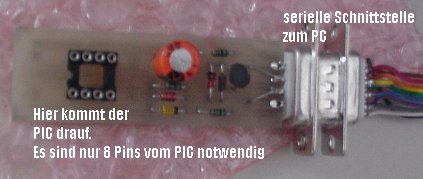
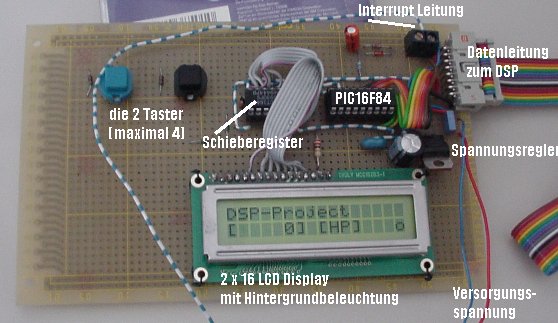
2.5. PIC Steuer Platine
Diese Platine dient dazu, den DSP Rechnerunabhängig zu Steuern. Gleichzeitig wird
auf dem LCD Display der Status angezeigt (in unserem Beispiel zB der Delta Wert).
Die Platine besitzt momentan 2 Taster, wobei einer für die Menüauswahl zuständig ist
und der andere für die Auswahl des jeweiligen Wertes. Gesteuert und verarbeitet werden
die ganzen Daten von einem PIC16F84. Weiters besitzt die Platine 4 Ausgangs I/O Ports
die mit dem DSP verbunden sind plus eine zusätzliche Leitung die den Interrupt am
DSP auslöst, falls neue Daten an den 4 Portpins anliegen.
Die Ansteuerung des Displays erfolgt mit Hilfe eines Schieberegisters. Dadurch sind
nur mehr 4 Portleitungen nötig und die restlichen 4 Portleitungen können für Taster
Eingaben benutzt werden.
Die Platine hat ebenfalls einen Festspannungsregler onboard, um Spannungsschwankungen
auszugleichen und eine exakte Gleichspannung zu liefern.
2.5.1. Daten des PIC16F84
- 4 MHz Takt (Quarzoszillator) - maximal 10 MHz
- 8 Bit
- 1x5 I/O und 1x8 I/O Ports (=13 I/O Pins)
- 1 kByte Flash Programm Speicher
- 68 Bytes RAM
- LED's direkt an den I/O Pins anschliessbar (max. 20-25mA pro Pin)
- diverse Powersave Modis
- 18 PIN DIP Sockel
3. Programme
3.1. Matlab Scripts
Jede Funktion in Matlab ist eine eigene Datei. Deshalb ist der gesamte Scriptcode auf 4 Dateien aufgespalten.
filterpass berechnet einen Remez-Filter. Mit dieser Funktion werden in tiefpass die Koeffizienten für ein Tiefpass-Filter berechnet. Die Funktion dofilter berechnet die Koeffizienten für den Hilbert-Transformator und das Verzögerungsglied, und speichert diese in y1.inc und y2.inc. Die Funktion gesamt erledigt mit Hilfe der anderen Funktionen die nötigen Berechnungen und gibt sie grafisch aus.
3.1.1. filterpass.m
1: function [VAL] = filterpass(Sig, N, Freq, Ampl)
2:
3:
4: B=remez(N,Freq,Ampl);
5: VAL=filter(B,1,Sig);
3.1.2. tiefpass.m
1: function [VAL] = tiefpass(Sig, N, GrenzFreq)
2:
3: VAL=filterpass(Sig, N, [0 (GrenzFreq-0.1) (GrenzFreq+0.1) 1],[1 1 0 0]);
3.1.3. dofilter.m
1: function [RE] = dofilter (Sig, N, Freq, n2)
2:
3:
4: B=remez(N,[.05 .95],[1 1],'HILBERT');
5: Y1=filter(B,1,Sig);
6: V=zeros(1,N+1);
7: V(N/2+1)=1;
8: Y2=filter(V,1,Sig);
9:
10: RE=cos(Freq*n2).*Y2-Y1.*sin(Freq*n2);
11:
12:
13: fh=fopen('c:\temp\y1.inc', 'w');
14: fprintf(fh, ';Hilbert Koeffizienten\r\n');
15: fprintf(fh, ' dc
16: fclose(fh);
17: fh=fopen('c:\temp\y2.inc', 'w');
18: fprintf(fh, ';Verzoegerungsglied\r\n');
19: fprintf(fh, ' dc
20: fclose(fh);
21:
3.1.4. gesamt.m
1: function gesamt
2:
3: T=[0:1:255];
4: s=zeros(1,256);
5: s(1)=1;
6: S=tiefpass(s,100,0.5);
7: plot(abs(fft(S)));
8: pause;
9: f=dofilter(S,100,pi/8,T);
10: plot(abs(fft(f)));
3.2. DSP Programm
3.2.1. Grundlagen
Der FIR-Filter selber multipliziert nur das Eingangssignal mit den einzelnen Koeffizienten und nimmt die Summe aus diesen Produkten. Die Hauptarbeit ist also die Berechnung der Koeffizienten und das wird in Matlab gemacht.
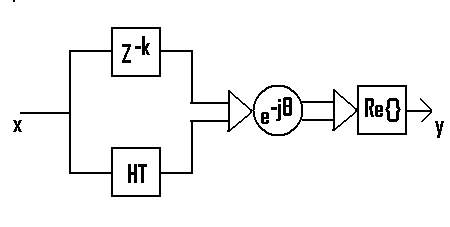
Beim Hilberttransformator werden zwei FIR-Filter benötigt (HT-Glied und Verzögerungsglied). Das Ergebniss wird nach
Re{} = yz[] * cos(f * n[]) - yHT[] * sin(f * n[]) berechnet.
3.2.2. Erklärung zum Programm
Das DSP Programm besteht aus drei Teilen.
Im ersten werden die Initialisierungen vorgenommen. Hier sind die Konstanten definiert, die Register werden geladen und die Sinus-Tabelle wird aus dem ROM Bereich in die zweite Speicherbank geladen.
Der zweite Teil beinhaltet das Hauptprogramm. Die Samples werden mit den Subroutinen proceed_ht (Hilbert-Transformator) und proceed_filter (Bandpass) bearbeitet und wieder ausgegeben. Leider ist der Zeitaufwand so hoch, dass beim verwendeten DSP die Samplingfrequenz nur 16kHz beträgt.
Der letzte Teil ist die Interrupt-Routine. Es wird das am Port anliegende Datennibbel als Delta-Wert für den Hilbert-Transformator gespeichert.
3.2.3. hilbert.asm
1: opt rc
2:
3: START equ $40
4:
5:
6:
7: n equ 100
8: wddr equ $100
9: wddr2 equ $200
10: cddr equ $100
11: cddr2 equ $200
12: cddr3 equ $500
13: tmp equ $800
14: aint equ $808
15: bint equ $810
16: x0int equ $818
17:
18: sin_ram equ $400
19: sinep equ $100
20: mask equ 255
21:
22: intmem equ $620
23:
24: org x:intmem
25: delta bsc 4,$0
26:
27: org x:wddr
28: smpl bsc 512,$0
29:
30: org y:cddr
31: include 'y1.inc'
32:
33: org y:cddr2
34: include 'y2.inc'
35:
36: org y:cddr3
37: include 'hp.inc'
38:
39: org x:sin_ram
40: sintab bsc 256,$FF
41:
42: org p:0
43: jmp START
44:
45: org p:$0008
46: jsr interrupt
47:
48: org p:$000C
49: jsr ssi_rx_isr
50: jsr ssi_rx_isr
51: jsr ssi_tx_isr
52: jsr ssi_tx_isr
53:
54: org p:START
55:
56:
57: include 'ada_init.asm'
58:
59: movep #$261009,x:PLL
60: movep #$0000,x:BCR
61: ori #3,mr
62: movec #0,sp
63: move #0,omr
64: move #$40,r6
65: move #-1,m6
66:
67:
68: bclr #$8,SR
69: bclr #$9,SR
70: move #$3003,a0
71: move a0,x:IPR
72:
73: TONE_OUTPUT EQU HEADPHONE_EN+LINEOUT_EN+(4*LEFT_ATTN)+(4*RIGHT_ATTN)
74: TONE_INPUT EQU MIC_IN_SELECT+(15*MONITOR_ATTN)
75:
76: move #TONE_OUTPUT,y0
77: move y0,x:TX_BUFF_BASE+2
78: move #TONE_INPUT,y0
79: move y0,x:TX_BUFF_BASE+3
80:
81:
82: move #sin_ram,r3
83: move #mask,m3
84: movec #6,omr
85:
86: move #sinep,r1
87: movec #mask,m1
88: move x:delta,n3
89: do #256,sine2ram
90: move y:(r1)+,a
91: move a,x:(r3)+
92: sine2ram
93: move #sin_ram,r3
94: movec #2,omr
95:
96:
97:
98: move #wddr,r1
99: move #wddr2,r2
100: move #cddr,r4
101: move #n,m1
102: move m1,m4
103: move m1,m2
104:
105:
106: move #1,a
107: move a,x:delta
108:
109:
110: opt cc
111:
112: loop
113: jset #2,x:SSISR,*
114: jclr #2,x:SSISR,*
115:
116:
117: move x:RX_BUFF_BASE,a
118: move x:RX_BUFF_BASE+1,b
119: add b,a
120: asr a
121: move a,x:tmp
122: jsr proceed_ht
123: jsr proceed_filter
124:
125: move x:tmp,b
126: asr b
127: asl a
128: add b,a
129:
130: move a,x:TX_BUFF_BASE
131: move a,x:TX_BUFF_BASE+1
132:
133: jmp loop
134:
135: proceed_filter
136: move #cddr3,r4
137:
138: move a,x:(r2)
139: clr a x:(r2)+,x0 y:(r4)+,y0
140: rep #n
141: mac x0,y0,a x:(r2)+,x0 y:(r4)+,y0
142: macr x0,y0,a (r2)-
143:
144: rts
145:
146: proceed_ht
147:
148: move #cddr,r4
149: move #cddr2,r5
150: move a,x:(r1)
151: clr a x:(r1)+,x0 y:(r4)+,y0
152: clr b y:(r5)+,y1
153: do #n,filter_loop
154: mac x0,y1,b y:(r5)+,y1
155: mac x0,y0,a x:(r1)+,x0 y:(r4)+,y0
156: filter_loop
157: macr x0,y0,a
158: macr x0,y1,b (r1)-
159:
160: move #64,n3
161:
162: move a,x0
163: move b,x1
164:
165: move x:(r3),y0
166: move x:(r3+n3),y1
167: move x:delta,n3
168: mpy y0,x0,a
169: mpy y1,x1,b (r3)+n3
170:
171: sub b,a
172:
173: rts
174:
175:
176: include 'txrx_isr.asm'
177:
178: interrupt
179: move a,x:aint
180: move b,x:bint
181: move x0,x:x0int
182:
183: move x:$FFE4,b
184: move #$F0000F,x0
185: and x0,b
186:
187: move b,x:delta
188:
189: move x:x0int,x0
190: move x:bint,b
191: move x:aint,a
192: rti
193:
194: end
3.3. PIC Programm
3.3.1. Schaltung zwischen PIC und DSP
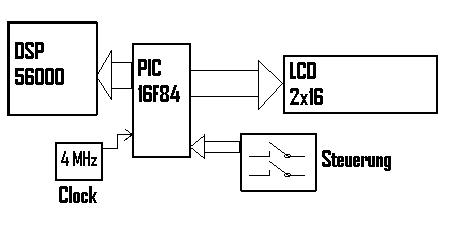
Der PIC wird mit 4 MHz getaktet. Er ist für die Steuerung des LC-Displays
und für die Steuerung der Funktionen des DSP zuständig. Die Eingangsgrössen
sind die beiden Taster, mit denen die zu ändernde Einstellung und
der dazugehörige Wert gewählt wird.
3.3.2. Erklärung zum Programm
Das PIC Programm gibt beim ersten Start den (C) Text aus. Dieser
wird durch einen Tastendruck gelöscht und der Status wird angezeigt.
Danach geht das Programm in eine Endlosschleife und wartet auf
Interrupts (die durch Tastendrücke - Highpegel an RB4 oder RB5 -
ausgelöst werden). Während des Wartens wird eine kleine Animation
abgespielt. Tritt nun ein Interrupt auf, wird nun ausgewertet, welcher
Taster betätigt wurde. Taster1 wählt die zu ändernde Einstellung, und
mit Taster2 läßt sich dann der gewünschte Wert einstellen.
Bei PIC_HT.ASM gibt es insgesamt 4 Menüpunkte, wobei nur der
Deltawert und der Hilbert On/Off Punkt implementiert wurde.
Nach jedem Tastendruck wird in der Interruptroutine die entsprechende
Aktion gesetzt (der Wert auf PortA geschrieben) und danach ein Interrupt
für den DSP ausgelöst (RA4). Schliesslich am Ende des Interrupts wird
mittels Aufruf von Routine menu das Display upgedatet.
Die Ausgabe am Display benutzt die Routine dataout, welche
die einzelnen Bits eines Bytes (dem Auszugebenden (Steuer)/Zeichen)
an das Schieberegister schickt und für jede Übernahme einen Taktimpuls
erzeugt. Wenn alle 8 Bits fertig geschickt sind, wird das Freigabe-Signal
geschickt und schliesslich das LCD Enable Signal zur Übernahme in das
Display erzeugt.
3.3.3. pic_ht.asm
1: list p=16f84
2:
3:
4:
5:
6:
7:
8:
9:
10:
11:
12:
13:
14:
15:
16:
17:
18:
19:
20:
21:
22:
23:
24:
25:
26:
27: status equ 03h
28: rp0 equ 05h
29: rp1 equ 06h
30: intcon equ 0Bh
31: porta equ 05h
32: trisa equ 85h
33: portb equ 06h
34: trisb equ 86h
35: sp1 equ 0Ch
36: sp2 equ 0Dh
37: sp3 equ 0Eh
38: sp4 equ 0Fh
39: sp5 equ 10h
40: sp6 equ 11h
41: sp7 equ 12h
42: sp8 equ 13h
43: sp9 equ 14h
44: sp10 equ 15h
45: sp11 equ 16h
46: sp12 equ 17h
47: sp13 equ 18h
48:
49:
50:
51: org 00h
52: goto start
53:
54:
55:
56:
57: org 004h
58:
59: btfss sp9,7
60: goto end_isr
61:
62: call Entprellen
63:
64: btfsc portb,4
65: goto a1
66:
67: btfsc portb,5
68: goto a2
69:
70: goto aout
71:
72:
73:
74: a1:
75: movfw sp10
76: sublw 1
77: sublw 0
78: btfsc status,2
79: goto chg_delta
80: sublw 1
81: sublw 0
82: btfsc status,2
83: goto chg_htflag
84: sublw 1
85: sublw 0
86: btfsc status,2
87: goto chg_bpflag
88: goto chg_nothing
89:
90: chg_delta:
91: incf sp11,1
92: movfw sp11
93: xorlw 0Eh
94: btfsc status,2
95: clrf sp11
96:
97: movfw sp11
98: bsf porta,4
99: addlw 1
100: iorlw b'00010000'
101: movwf porta
102: call DSP_Int
103: bsf sp13,0
104: goto chg_nothing
105:
106: chg_htflag
107: btfss sp13,0
108: goto set_htflag
109: bcf sp13,0
110: movlw 0
111: iorlw b'00010000'
112: movwf porta
113: call DSP_Int
114: goto end_htflag
115: set_htflag
116: bsf sp13,0
117: movfw sp11
118: bsf porta,4
119: addlw 1
120: iorlw b'00010000'
121: movwf porta
122: call DSP_Int
123: end_htflag
124: goto chg_nothing
125:
126: chg_bpflag
127: btfss sp13,1
128: goto set_bpflag
129:
130: bcf sp13,1
131: goto end_bpflag
132: set_bpflag
133: bsf sp13,1
134:
135: end_bpflag
136: goto chg_nothing
137:
138:
139: chg_nothing:
140: call menu
141: goto aout
142:
143: a2:
144: incf sp10,1
145: btfsc sp10,2
146: clrf sp10
147: call menu
148: goto aout
149:
150: aout:
151: bsf sp9,6
152: end_isr:
153: bcf intcon,0
154: retfie
155:
156:
157: start:
158: bcf sp9,6
159: bcf sp9,7
160:
161: movlw b'11110000'
162: tris portb
163:
164: movlw b'00000000'
165: tris porta
166:
167: bcf portb,2
168: bcf portb,3
169: bsf porta,4
170:
171: movlw 0h
172: movwf sp8
173:
174: movlw b'10001000'
175: movwf intcon
176:
177:
178:
179:
180: endlos:
181: bcf portb,2
182:
183: movlw b'00000001'
184: call dataout
185:
186: movlw b'00000110'
187: call dataout
188:
189: movlw b'00001100'
190: call dataout
191:
192: movlw b'00111000'
193: call dataout
194:
195: bsf portb,2
196:
197: movlw b'01000100'
198: call dataout
199: movlw b'01010011'
200: call dataout
201: movlw b'01010000'
202: call dataout
203: movlw b'00101101'
204: call dataout
205: movlw b'01010000'
206: call dataout
207: movlw 72h
208: call dataout
209: movlw 6fh
210: call dataout
211: movlw 6Ah
212: call dataout
213: movlw 65h
214: call dataout
215: movlw 63h
216: call dataout
217: movlw 74h
218: call dataout
219:
220: bcf portb,2
221: movlw b'11000000'
222: call dataout
223: bsf portb,2
224:
225:
226: movlw 62h
227: call dataout
228: movlw 79h
229: call dataout
230: movlw 20h
231: call dataout
232: movlw b'01001100'
233: call dataout
234: movlw b'01100101'
235: call dataout
236: movlw b'01101111'
237: call dataout
238: movlw 26h
239: call dataout
240: movlw 4eh
241: call dataout
242: movlw 69h
243: call dataout
244: movlw 63h
245: call dataout
246: movlw b'01101111'
247: call dataout
248:
249:
250: bsf portb,2
251: movlw 20h
252: call dataout
253: bsf sp9,7
254:
255:
256: x:
257:
258:
259: bcf portb,2
260: movlw b'11001111'
261: call dataout
262: bsf portb,2
263: movlw 2eh
264: call dataout
265:
266: call zeit_30_1ms
267:
268: bcf portb,2
269: movlw b'11001111'
270: call dataout
271: bsf portb,2
272: movlw 6fh
273: call dataout
274:
275: call zeit_30_1ms
276:
277: bcf portb,2
278: movlw b'11001111'
279: call dataout
280: bsf portb,2
281: movlw 4fh
282: call dataout
283:
284: call zeit_30_1ms
285:
286: bcf portb,2
287: movlw b'11001111'
288: call dataout
289: bsf portb,2
290: movlw 6fh
291: call dataout
292:
293: call zeit_30_1ms
294:
295: goto x
296:
297:
298:
299: menu:
300: bcf portb,2
301: movlw b'00000110'
302: call dataout
303:
304: movlw b'00111000'
305: call dataout
306:
307: movlw b'11000000'
308: call dataout
309: bsf portb,2
310:
311: movfw sp10
312: sublw 1
313: sublw 0
314: btfsc status,2
315: goto show_delta
316: sublw 1
317: sublw 0
318: btfsc status,2
319: goto show_htflag
320: sublw 1
321: sublw 0
322: btfsc status,2
323: goto show_firflag
324: goto show_nothing
325:
326: show_delta:
327:
328: movlw 44h
329: call dataout
330: movlw 45h
331: call dataout
332: movlw 4Ch
333: call dataout
334: movlw 54h
335: call dataout
336: movlw 41h
337: call dataout
338: movlw 20h
339: call dataout
340:
341: movfw sp11
342: addlw 1h
343: sublw 0Ah
344: btfsc status,2
345: goto zehn_anzeigen
346: btfss status,0
347: goto zehn_anzeigen
348: movlw 20h
349: call dataout
350: movfw sp11
351: addlw 30h
352: addlw 1h
353: call dataout
354: goto kleiner_10
355: zehn_anzeigen:
356: movlw 31h
357: call dataout
358: movfw sp11
359: addlw 1h
360: sublw 0Ah
361: sublw 0
362: addlw 30h
363: call dataout
364: kleiner_10
365:
366: movlw 20h
367: call dataout
368: movlw 20h
369: call dataout
370: movlw 20h
371: call dataout
372: movlw 20h
373: call dataout
374: movlw 20h
375: call dataout
376:
377: goto end_menu
378:
379: show_htflag
380: movlw 48h
381: call dataout
382: movlw 49h
383: call dataout
384: movlw 4Ch
385: call dataout
386: movlw 42h
387: call dataout
388: movlw 45h
389: call dataout
390: movlw 52h
391: call dataout
392: movlw 54h
393: call dataout
394: movlw 20h
395: call dataout
396:
397: btfss sp13,0
398: goto showset_htflag
399: movlw 4Fh
400: call dataout
401: movlw 4Eh
402: call dataout
403: movlw 20h
404: call dataout
405: goto showend_htflag
406: showset_htflag
407: movlw 4Fh
408: call dataout
409: movlw 46h
410: call dataout
411: movlw 46h
412: call dataout
413: showend_htflag
414: goto end_menu
415:
416: show_firflag
417: movlw 46h
418: call dataout
419: movlw 49h
420: call dataout
421: movlw 52h
422: call dataout
423: movlw 46h
424: call dataout
425: movlw 49h
426: call dataout
427: movlw 4Ch
428: call dataout
429: movlw 54h
430: call dataout
431: movlw 20h
432: call dataout
433:
434: btfss sp13,1
435: goto showset_firflag
436: movlw 4Fh
437: call dataout
438: movlw 4Eh
439: call dataout
440: movlw 20h
441: call dataout
442: goto showend_firflag
443: showset_firflag
444: movlw 4Fh
445: call dataout
446: movlw 46h
447: call dataout
448: movlw 46h
449: call dataout
450: showend_firflag
451: goto end_menu
452:
453: show_nothing:
454:
455: movlw 4Eh
456: call dataout
457: movlw 20h
458: call dataout
459: movlw 49h
460: call dataout
461: movlw 20h
462: call dataout
463: movlw 58h
464: call dataout
465: movlw 20h
466: call dataout
467: movlw 20h
468: call dataout
469:
470: movlw 20h
471: call dataout
472: movlw 20h
473: call dataout
474:
475: end_menu:
476: movlw 20h
477: call dataout
478: movlw 20h
479: call dataout
480: movlw 20h
481: call dataout
482: movlw 20h
483: call dataout
484:
485:
486:
487:
488: return
489:
490:
491:
492:
493:
494: DSP_Int
495: call zeit_13_1ms
496: bcf porta,4
497: call zeit_5_1ms
498: bsf porta,4
499: call zeit_5_1ms
500: call zeit_5_1ms
501: return
502:
503:
504:
505:
506: dataout:
507: movwf sp1
508: bcf status,0
509: movlw b'00001001'
510: movwf sp2
511:
512: dataout1:
513: decfsz sp2,1
514: goto dataout2
515: goto uu
516: return
517:
518: dataout2:
519: rrf sp1,1
520: btfss status,0
521: goto null
522: goto eins
523:
524: null:
525: bcf portb,0
526:
527: call clock
528: goto dataout1
529:
530: eins:
531: bsf portb,0
532:
533: call clock
534: goto dataout1
535:
536: clock:
537: bcf portb,1
538: bsf portb,1
539: bcf portb,1
540: return
541:
542: uu:
543: bcf portb,3
544: call zeit_13_1ms
545: bsf portb,3
546: call zeit_13_1ms
547: bcf portb,3
548: return
549:
550:
551:
552:
553: zeit_13_1ms:
554: movlw b'00000011'
555: movwf sp3
556:
557: movlw b'00000001'
558: movwf sp4
559:
560: zeit_13_2ms:
561: decfsz sp3,1
562: goto zeit_13_3ms
563: return
564:
565: zeit_13_3ms:
566: decfsz sp4,1
567: goto zeit_13_3ms
568: goto zeit_13_2ms
569:
570:
571:
572:
573: zeit_30ms:
574: call zeit_30_1ms
575: return
576:
577: zeit_30_1ms:
578: movlw b'11111111'
579: movwf sp3
580:
581: zeit_30_2ms:
582: movlw b'11111111'
583: movwf sp4
584: decfsz sp3,1
585: goto zeit_30_3ms
586: return
587:
588: zeit_30_3ms:
589: decfsz sp4,1
590: goto zeit_30_4ms
591: goto zeit_30_2ms
592:
593: zeit_30_4ms:
594: nop
595: nop
596: nop
597: nop
598: nop
599: goto zeit_30_3ms
600:
601:
602:
603:
604: Entprellen
605: nop
606: call zeit_4x_1ms
607: nop
608: call zeit_4x_1ms
609: nop
610: return
611:
612: zeit_4x_1ms:
613: movlw b'11111111'
614: movwf sp5
615:
616: zeit_4x_2ms:
617: movlw b'00000110'
618: movwf sp6
619: decfsz sp5,1
620: goto zeit_4x_3ms
621: return
622:
623: zeit_4x_3ms:
624: decfsz sp6,1
625: goto zeit_4x_4ms
626: goto zeit_4x_2ms
627:
628: zeit_4x_4ms:
629: nop
630: goto zeit_4x_3ms
631:
632:
633:
634:
635:
636: zeit_5_1ms:
637: movlw b'00000111'
638: movwf sp3
639:
640: movlw b'00001111'
641: movwf sp4
642:
643: zeit_5_2ms:
644: decfsz sp3,1
645: goto zeit_5_3ms
646: return
647:
648: zeit_5_3ms:
649: decfsz sp4,1
650: goto zeit_5_3ms
651: nop
652: nop
653: nop
654: goto zeit_5_2ms
655:
656:
657: end
658:
659:
660:
661:
662:
663:
664:
665:
666:
667:
4. Protkoll
| Datum |
Eintrag |
| 11.09.2000 |
Anpassen des Entwicklungsrechners und installieren der Software.
|
| 14.09.2000 |
Kennenlernen von Matlab (Demo-Programme)
|
| 18.09.2000 |
Optimieren der Softwareeinstellungen, Kennenlernen der Assemblerspreche des DSP
|
| 21.09.2000 |
Entwerfen von Analog- und Digitalfilter in Matlab
|
| 25.09.2000 |
FIR-Filter programmiert, mit Matlab verschiedene FIR-Filter entworfen und am DSP getestet
|
| 28.09.2000 |
Protokoll-Arbeiten und entwickeln mit Matlab
|
| 02.10.2000 |
Fehlersuche im Programm, da sich der Filter nicht so anhört wie er sollte
|
| 03.10.2000 |
Arbeiten an allgemeiner Dokumentation
|
| 04.10.2000 |
Konzeption der Webdokumentation
|
| 09.10.2000 |
Genau Messung des DSP-Outputs mit Spektrumanalyzer um den Fehler einzugrenzen; debuggen des Programms
|
| 10.10.2000 |
Arbeit im Labor: Fehler im Programm gefunden (zirkuläre Adressierung); trotzdem zeigt die Analyse mit Spektrumanalyzer noch immer Fehler
|
| 11.10.2000 |
weitere theoretische Fehlersuche im Programm
|
| 16.10.2000 |
Falsche Implementierung im Motorola Originalquellcode (FIR-Filter) gefunden; Messung mit Spektrumanalyzer ergibt gleiches Ergebniss wie in Theorie (Matlab)
|
| 17.10.2000 |
Neuschreiben des Programmes zur besseren Übersicht
|
| 18.10.2000 |
Erstellen von Grafiken mit Matlab
|
| 23.10.2000 |
Echoprogramm zum Programm hinzugefügt; Einarbeitung in PIC-Programmierung
|
| 24.10.2000 |
Weitere Informationen über PIC gesucht
|
| 25.10.2000 |
Zusammenfassen und Ausdrucken der gefundenen PIC-Dokumentation
|
| 30.10.2000 |
PIC Programmer aufgebaut. Doku auf englisch verfasst und Projekt auf Englisch erklaert. Beginn mit Aufbau der PIC Ansteuer/Anzeige Unit.
|
| 31.10.2000 |
Weitere Referenzen zu PIC gesucht
|
| 6.11.2000 |
LCD Platine fuer PIC fertig geloetet. PIC Programmer getestet - keine Funktion - Fehlersuche - Fehler behoben. PIC Programm funktioniert.
|
| 7.11.2000 |
Fehler auf PIC Platine: zu hoher Stromverbrauch. Fehlersuche im Labor: Hintergrundbeleuchtung ohne Vorwiderstand (Fehler im Schaltplan). LCD Doku gesucht. Preprozessor fuer Assemblerprogramme entwickelt.
|
| 8.11.2000 |
PIC Dokumentation genau durchgenommen (Interrupt, Register-Mapping, Speicherbelegung, I/O Ports, ...)
|
| 13.11.2000 |
DSP Programm (FIR Filter+Echo) Interrupt faehig gemacht. Durch IRQA auf Masse Signal ein/ausschalten bzw. dann Echo an/aus. Interface von PIC Steuerplatine zu DSP hergestellt. PIC Programm angepasst. Tastenentprellung perfektioniert.
|
| 14.11.2000 |
im Labor: DSP Programm: je nach Bitkombination an Port B Echo ein/aus oder Filter ein/aus. PIC Programm angepasst. Fehler in Filterroutine beseitigt. DSP Programm weiterentwickelt um zwischen 2 Filter umzuschalten.
|
| 15.11.2000 |
FREI
|
| 18.11.2000 |
Labor: Tag der offenen Tuer: Praesentation des DSP und der PIC Steuerung. DSP Programm optimiert (Lautstaerkeanpassung)
|
| 20.11.2000 |
Filter mit FFT Analyzer nachgemessen - kleiner Fehler bei Anzahl der Koeffizienten korrigiert. Analyse ok.
|
| 21.11.2000 |
in Labor: Fehler bei PIC Platine gesucht - teilweise mehrmaliges Einschalten erforderlich.
|
| 22.11.2000 |
in PIC Dokumentation Hinweis auf Fehlerursache gesucht.
|
| 27.11.2000 |
Fehlerursache: Nicht beschaltener Reset Eingang. korrigiert. Weitergearbeitet an DSP Programm. neue Koeffizienten probiert.
|
| 28.11.2000 |
in Labor: Parallelgruppe mit PIC und Programm geholfen.
|
| 29.11.2000 |
Informationen zu Hilbert Filter gesucht und Funktion im Matlab angeschaut.
|
| 4.12.2000 |
Modulationsfilter Entwurf mit Matlab. Darstellung nicht korrekt.
|
| 5.12.2000 |
Analyse der genauen Funktionsweise des Modulationsfilters.
|
| 6.12.2000 |
weitere Analyse. weiterhin Probleme.
|
| 11.12.2000 |
Weiterentwicklung des Modulationsfilters. korrekte Funktion des Hilbert Filters und des Verzoegerungsgliedes. Grafische Darstellung im Matlab ok.
|
| 12.12.2000 |
M-Files im Matlab fuer die Filter und die Modulation erstellt.
|
| 13.12.2000 |
M-Files zu einer Gesamtpraesentation zusammengefasst.
|
| 18.12.2000 |
Ueberlegungen der Implementation im DSP Programm. grosse Probleme mit der Modulation selbst (e^jO, sinus/cosinus)
|
| 19.12.2000 |
Application Sheets zu Sinus fuer DSP gesucht/ausgedruckt.
|
| 20.12.2000 |
Durchschauen und versuchen, die Funktionsweise des Sinus und der Tabelle zu verstehen.
|
| 8.1.2001 |
Versuchen, im DSP Programm die Sinus Tabelle anzusprechen. Probleme mit OMR usw.
|
| 9.1.2001 |
im Labor: endlich korrektes Auslesen der Sinus Tabelle (Probleme mit Speicherbereiche beseitigt). Ausgabe eines Sinus Ton. Analyse mit Oszi - wunderschoener Sinus ;-)
|
| 10.1.2001 |
Mit Vorarbeiten an Praesentation begonnen.
|
| 15.1.2001 |
Ueberarbeiten des DSP Programms, um 2 Filter zu durchlaufen (Verzoegerungsglied und Hilbert). Modulation (nach Formel mit Sinus und Cosinus). Ergebnis entspricht nicht eines gepitchten Signals.http://
|
| 16.1.2001 |
im Labor: weitere Analyse des Programms. Sinus und Cosinus Werte sind korrekt. Filterroutinen funktionieren korrekt. Trotzdem nicht gewuenschtes Ergebnis.
|
| 17.1.2001 |
Recoding des DSP Programms (sinus3.asm). Neuanordnung der Speicherbereiche. Dokumentation des Quellcodes.
|
| 22.1.2001 |
Fehler gefunden: Beim Cosinus wird ein 2tes Mal weitergezaehlt. Aufgrund Timing-Optimierungen Sinus und Cosinus direkt in den Main Loop und Debug Code eliminiert.
|
| 23.1.2001 |
Analyse mit FFT. Wahrscheinlich Problem mit Hilbert Filter: negative Frequenzanteile werden auch gepitcht. Delta Wert stimmt aber laut Messung.
|
| 24.1.2001 |
Aufbereiten der Projektdoku.
|
| 29.1.2001 |
PIC Platine - Fehler bei Power on Reset - korrigiert. Im PIC Programm Fehler bei Warteroutine zeit_30_1 korrigiert. PIC Programm korrigiert. DSP Programm um IRQ Steuerung erweitert, um Hilbert Filter ein/auszuschalten. Serielles Verlängerungskabel gebaut. DSP kann Stereo.
|
| 30.1.2001 |
im Labor: Geschwindigkeitsprobleme, wegen Stereo. Mit Samplingfrequenz runtergegangen. Weiterhin Fehler wegen der negativen Frequenzanteile.
|
| 31.1.2001 |
Theoretisches durchgehen des DSP Programms und Fehlersuche wegen negativen Frequenzen.
|
| 5.2.2001 |
Ferien
|
| 6.2.2001 |
Ferien
|
| 7.2.2001 |
Ferien
|
| 12.2.2001 |
Komplettes recoding des DSP Hilbert Programms. Stereo deaktiviert und Interrupts deaktiviert. Beide Kanäle zusammen addiert um 1 einzelnes Signal zu bekommen.
|
| 13.2.2001 |
im Labor: weitere Messungen durchgeführt - noch immer Fehler. durchgehen der Speicherbereiche (vielleicht zirkuläre Buffer ?). checken der Sinus Routine.
|
| 14.2.2001 |
Kommentieren des PIC Programms
|
| 19.2.2001 |
Nochmalige Messung mit Spektrumanalyser. Auf einmal nur mehr eine Spektrallinie (keine negative mehr). Doch das nur in einem sehr kleinen Frequenzbereich (hat in keiner Weise mit den Hilbertkoeffizienten zu tun). Darüber hinaus komische Ergebnisse im Spektrum.
|
| 20.2.2001 |
im Labor: Suche des Fehlers, warum ausserhalb des kleinen Frequenzbereichs solch komische Fehler auftreten. Überprüfen der Matlabkoeffizienten.
|
| 21.2.2001 |
DSP Programm kommentiert.
|
| 26.2.2001 |
Fehler gefunden, wieso bei den Messungen diese Ergebnisse rauskommen: Falsche Einstellungen beim Spektrumanalyser. Nach wiederherstellen der richtigen Einstellungen wieder dasselbe Problem wie vorher - negative Spektrallinien werden wieder moduliert.
|
| 27.2.2001 |
im Labor: Fehler nicht auffindbar. ratlosigkeit
|
| 28.2.2001 |
Übungen mit ANA
|
| 5.3.2001 |
Da noch immer Fehler, Prof. Wess um Hilfe gebeten. Gemeinsam das Programm durchgegangen, doch noch zu keinem Ergebnis.
|
| 6.3.2001 |
im Labor: Instruktionen, alle Sachen aus dem Programm zu nehmen, die nicht mehr nötig sind (sprich: temp variablen, Speicherreservierungen die nicht mehr genutzt werden, Interrupt aktivierungsroutinen, ...)
|
| 7.3.2001 |
Übungen mit PSPice und ANA
|
| 12.3.2001 |
Gemeinsam mit Prof. Wess den nun überarbeiteten Code durchgecheckt. Überprüfung der Speicherbereiche (zirkuläre Buffer) - ok ! Überprüfen wegen der Definition von n (Delta) und logisches Durchgehen der Anzahl der Repeat anweisungen und initialisieren der korrekten Wertes der m Register. 1 Fehler entdeckt und korrigiert. Doch weiterhin kein korrektes Ergebnis.
|
| 13.3.2001 |
im Labor: Nochmaliges Überprüfen der Sinus Routine: Fehler entdeckt. Da der Cosinus ebenfalls aus der 256 Werte Sinustabelle gebildet wird (sprich um 64 Verschoben) ungewollte zusätzliche Phasenverschiebung zwischen Berechnung des Cosinus und des Sinus - logischer Denkfehler - korrigiert. Programm funktioniert nun einwandfrei.
|
| 14.3.2001 |
Vorbereiten für div. andere Fächer (tests !!)
|
| 19.3.2001 |
Sinus3.asm funktioniert !! Nur mehr die positiven Anteile werden gepitcht. Nun Recoding und Geschwindigkeitsoptimierungen (Hilbert.asm).
|
| 20.3.2001 |
im Labor: die beiden Filterschleifen in eine einzelne verpackt. Alle Befehle, die sich parallelisieren lassen ausgenutzt.
|
| 21.3.2001 |
Weitere Auseinandersetzung mit Programmierung von Mikrocontrollern (EDT)
|
| 26.3.2001 |
FIR Filter Routine (Bandpass) im DSP Programm implementiert, um nur das Sprachsignalband zu erhöhen. Notwendige Änderung: Extremes herabsetzen der Samplingfrequenz (auf 16 kHz). Probieren, welche Bandbreite der Bandpass haben muss.
|
| 27.3.2001 |
im Labor: allgemeine Einführung in die Programmierung von Mikrocontrollern (EDT) für einige Schulkollegen.
|
| 28.3.2001 |
Ausarbeitung eines neuen Konzepts für die Präsentation und Dokumentation (/kurzdoku)
|
| 2.4.2001 |
Neues PIC Programm PIC_TST5.ASM (Grundgerüst von pic_tst4.asm übernommen). Ziel: Steuerung des DSP (einstellen der Deltavariable, Hilbert ein/ausschalten). Überlegungen eins genialen Übertragungsprotokolls (2&3 Byte Kommandos). Anpassen des DSP Programms HILBERT.ASM (IRQ Steuerung). Umlöten des PIC Boards, daß RB0-RB3 angesprochen wird.
|
| 3.4.2001 |
im Labor: Fehler bein Interrupt im DSP Programm. Vergessen in die Interrupt Tabelle einzutragen und Initialisierungscode vom Interrupt Fehlerhaft - korrigiert ! Implementierung des Protokolls in den PIC. Interrupt wird aufgerufen, doch Delta Wert wird nicht korrekt geändert.
|
| 4.4.2001 |
weiteres kennenlernen und arbeiten mit PSpice. Ausgabe am Display und Code vom PIC Programm PIC_TST5.ASM verschönert.
|
| 9.4.2001 |
Osterferien
|
| 10.4.2001 |
Osterferien
|
| 11.4.2001 |
Osterferien
|
| 16.4.2001 |
Osterferien: Debuggen des DSP Programms. Komisches Verhalten beim AND (wenn AND Wert kleiner FFh). Korrigiert, indem AND mit F0000Fh. Korrektur im PIC_TST5.ASM: Es wurde ein Interrupt zuviel ausgelöst. Nun korrekte Übernahme des Delta Werts.
|
| 17.4.2001 |
Osterferien: Display Ausgabe verschönert und debuggen des PIC Programms mittels "DEBUG Sockel - Ausgabe auf LED's). Implementierung von 2 Byte Kommandos. Funktioniert nicht. Idee mit 2&3Byte Protokoll verworfen und einfacheres angepasstes Protokoll verwendet. Kein Erfolg, da in der Interrupt Routine nur 1 einzelnes decrease abgearbeitet wird. dann nicht mehr. Nun ganz einfaches Protokoll implementiert - nur Änderung des Delta Wertes und Ausschalten des Hilbertfilters. PIC angepasst. Funktioniert !!
|
| 18.4.2001 |
Osterferien: Übernehmen der Alten Dokumentation in die neue (/kurzdoku) |
X. Anhang
X.A. Quellenangabe
- Motorola Handbücher zum DSP 56002
- Matlab Online Hilfe
- Maturaprojekt von Eggler/Geiger von 1998/99 für HTL 1, Schellinggasse
- Peer's LCD Pages
X.B. Eigene Unterlagen
Unsere Programme, Dokumentationen und Präsentation sind auch online zu bekommen unter http://blub2k.yi.org/dsp/.
Bei weiteren Fragen sind wir auch per E-Mail zu erreichen:
X.C. Diese Dokumentation
Diese Dokumentation basiert auf Scripts von view->source[Nico Edtinger] um sie sowohl online verfügbar als auch druckbar zu machen. In nächster Zeit wird der Code unter der GPL auf http://viewsource.web.ag/ zur Verfügung stehen.
Das Copyright für den gesamten Inhalt liegt bei Leo Eibler und Nico Edtinger. Wir sind per Mail zu ereichen falls jemand größere Auszüge aus dieser Dokumentation verwenden will.

